

喜报!我校学子在第十五届“挑战杯” 广东大学生创业计划竞赛决赛中斩获佳绩
初审:高士然 复审:宋苗苗 终审:陈殿藩
5月22日至5月24日,由广东省教育厅、广东省科学技术厅、广东省人力资源和社会保障厅、广东省社会科学、广东省科学技术协会、广东省学生联合会、河源市“百千万工程”指挥部共同主办的第十五届“挑战杯”广东大学生创业计划竞赛终审决赛在广东技术师范大学(河源校区)顺利举办。我校学子锐意奋进,在终审决赛中斩获银奖2项、铜奖9项。
我校师生在第十五届“挑战杯”广东大学生创业计划竞赛终审决赛现场
学校始终将培育学生科技创新能力作为育人工作的重要方向,自大赛启动以来,经学生自主申报、二级学院层层评审,主体赛共收到来自各学院的参赛作品132项;经对参赛队伍资格审核、邀请校内外专家线上评审,最终30支项目团队入围校级终审决赛。专项赛共收到来自各学院的参赛作品25项。依据校内终审决赛成绩,结合省竞赛组委会下达的名额,最终我校推选主体赛作品12项、专项赛作品25项参加省级复赛。
我校参赛作品紧扣省委“百千万工程”重大战略部署,全面覆盖科技创新和未来产业、乡村振兴和农业农村现代化、社会治理和公共服务、生态文明建设和绿色低碳发展、文化创意和区域交流合作五大核心赛道,既有聚焦人工智能、生物医药、新材料等前沿领域的硬核技术突破,也有立足粤港澳大湾区建设、服务基层民生需求的暖心实践方案,既体现了严谨求实的科学态度,又彰显了鲜明的时代特色,整体呈现出极高的竞技水平与创新活力,生动诠释了新时代广东大学生敢想敢闯、勇于探索、追求卓越的青春风采与服务地方高质量发展的责任担当。


第十五届“挑战杯”广东大学生创业计划竞赛校内赛现场
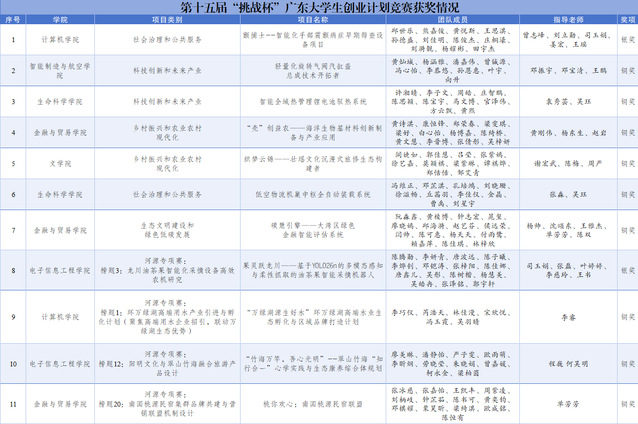
省赛终审决赛获奖名单
优秀作品信息介绍:
1.主体赛获银奖团队:颤捕士——智能化手部震颤病症早期筛查设备

《颤捕士——智能化手部震颤病症早期筛查设备》校内赛线下答辩现场
作品类别:社会治理和公共服务
指导老师:曾志峰、刘立勋、司玉娟、姜宏、王瑶
团队成员:邱世乐、熊嘉俊、黄悦斯、王思淇、孙德盛、刘佳明、陈俊杰、庄桐濠、刘漪靓、杨耀彬、田宇杰
项目简介:
本项目基于多模态智能感知与深度学习融合技术,构建集视觉识别、毫米波雷达与磁传感协同采集于一体的手部震颤智能分析系统,突破传统筛查设备体积庞大、操作复杂及检测成本高等行业痛点。项目通过融合动态时间规整算法(DTW)、混合神经网络及跨模态特征交互架构,结合自适应权重优化模型,实现对十二项核心病理特征的高精度量化分析与智能评估,并生成特征热力图进行可视化病症关联呈现。该设备具备智能化、便携化、高精度等显著优势,可广泛应用于帕金森病等神经系统疾病的早期筛查与辅助诊断,有效提升疾病早筛效率与基层医疗普及水平,帮助患者把握最佳干预时机,降低社会医疗负担,为智慧医疗与神经疾病精准诊疗领域提供高可靠性、低成本的创新解决方案,具备广阔的市场应用前景与社会价值。
2.河源专项赛获银奖团队:果灵跃龙川——基于YOLO26n的多模态感知与柔性抓取的油茶果智能采摘机器人
《颤捕士——智能化手部震颤病症早期筛查设备》省决赛参赛现场
专项赛类别:榜题3:龙川油茶果智能化采摘设备高效农机研究
指导老师:司玉娟、张磊、叶婷婷、李慈玲、王书玉
团队成员:陈腾勋、唐波远、吴皓冉、陈子曦、李妍青、李烨钊、邓铠涛、张梓阳、陈佳娜、唐鑫儿、吴彤、陈树楷、杨慧美、张泽铭、郭宇轩
项目简介:
针对河源市龙川县油茶果园人工采摘成本高、效率低、损伤率大等难题,本项目研发了一款基于YOLO26n多模态感知与柔性抓取的智能采摘机器人。机器人采用“六轴机械臂+仿生扭转末端执行器+伞形集果装置”结构,融合夜间特征增强算法、HSV色彩增强与改进Mosaic策略,在光照不均、遮挡严重的林间实现94.2%的采摘准确率。自研轻量化AI决策模型,结合改进RRT*路径规划与DDPG强化学习PID自整定,提升机械臂动态控制精度。末端执行器配备多款快换模块化柔性夹爪,通过“柔性夹持-仿生扭转”模拟人工拧断果柄,损伤率降至3%以内。采用三角履带底盘可适应30°以上坡地,配合重力卸料式集果网,整体采摘效率较人工提升3倍以上,为丘陵地区油茶果自动化采摘提供了可靠的技术路径。
未来,校团委将持续完善“科创育人”体系,积极搭建高质量创新实践平台,组织开展挑战杯项目培育打磨系列活动,不断挖掘培育有潜力的创新创业项目,以更高标准、更实举措推动“挑战杯”参赛作品从“赛场”到“市场”。为地方高质量发展注入青春动能,在助力“百千万工程”与绿美广东生态建设中担当作为、贡献珠科智慧与力量。